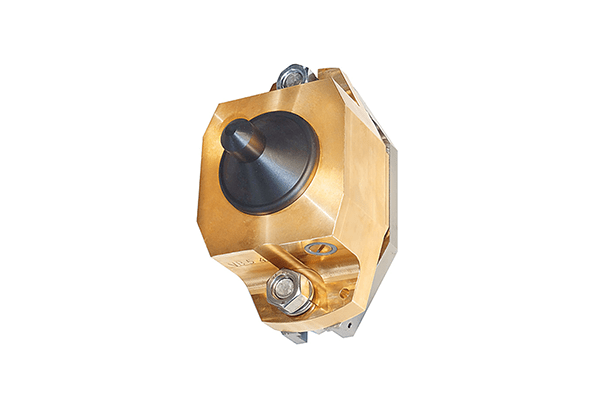
The NEMO BT, a sensor for diaphragm walls
The NEMO BT is a deviation and inclination sensor for grabs.
It is equipped with a Bluetooth radio transmitter and a battery. In the absence of communication (immersed sensor), the measured values are stored in the internal memory of the NEMO BT, they are transmitted from the sensor to the device.
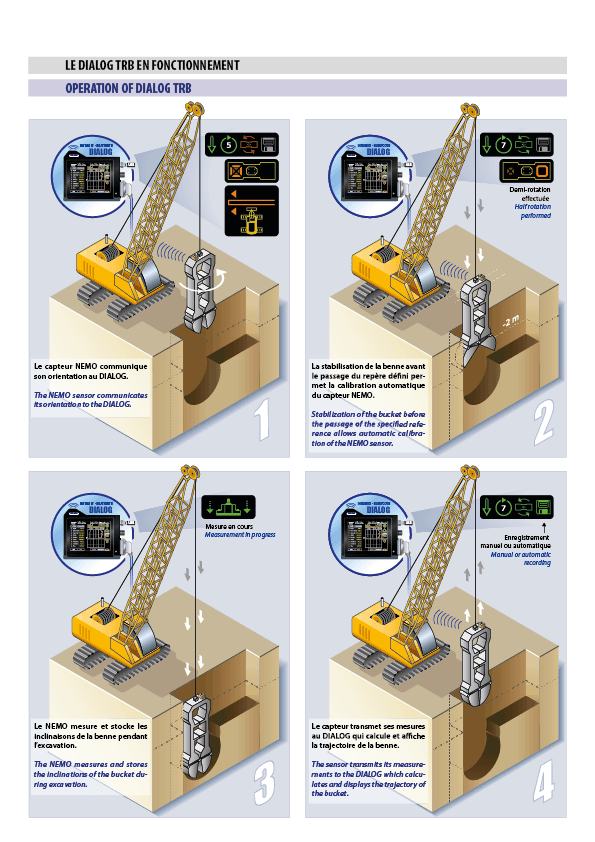
The DIALOG MX measures the trajectory made by the grab as it descends into the wall. The differences between the vertical axis of the wall and the path followed by the bucket measure the deviation.
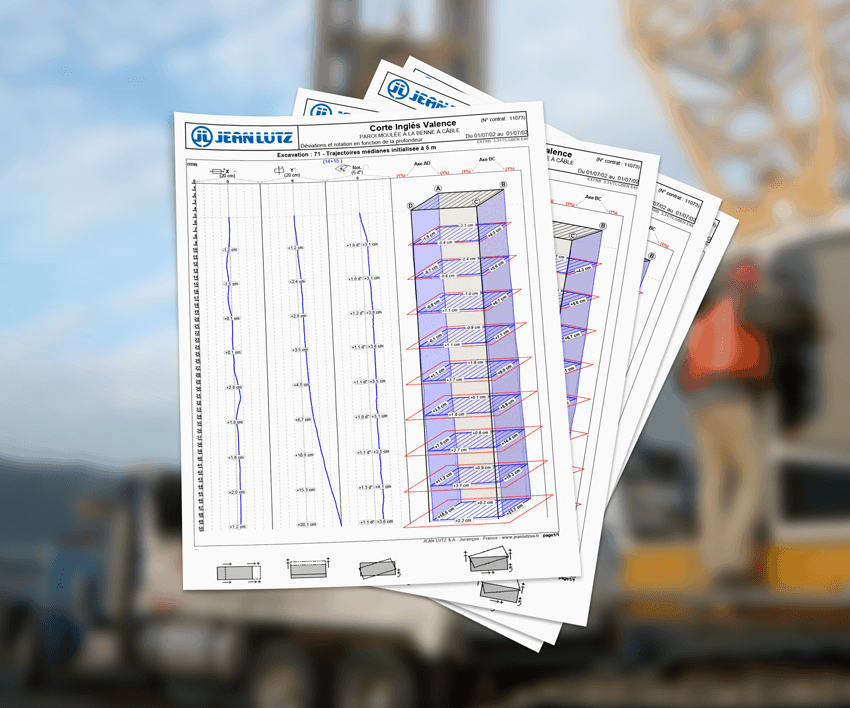
The three main axes of deviations are measured:
- in the vertical plane, parallel to the axis of the wall
- in the vertical plane, perpendicular to the axis of the wall
- the deviation due to the rotation of the bucket around its own axis
The trajectory of the grab is calculated by integrating the inclinations as a function of depth and rotation as a function of time. The algorithms of the DIALOG MX correct the systematic errors generated by the sensors.
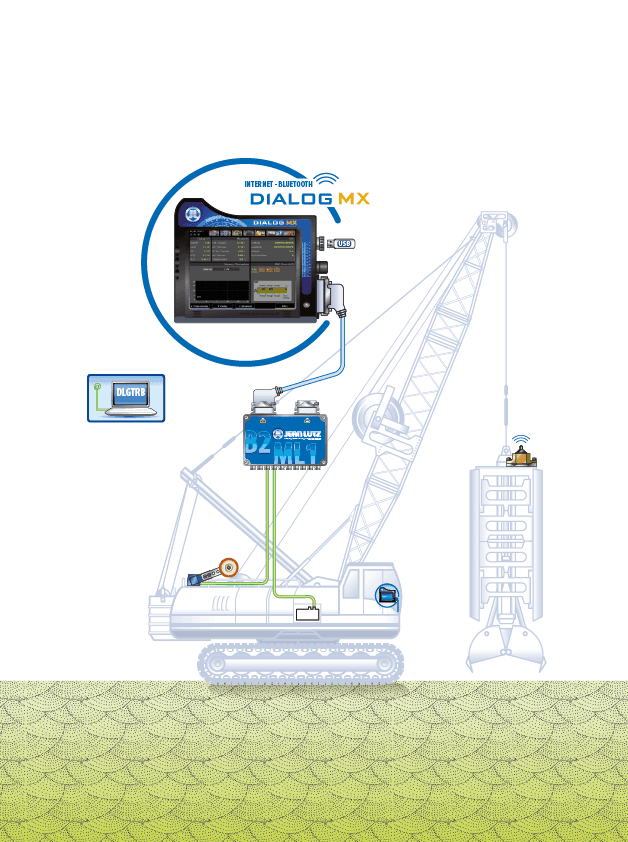
The DIALOG MX TRB set includes 2 sensors: a depth sensor and the NEMO BT sensor installed on the grab.
The NEMO BT sensor measures the inclination of the grab (inclinometers) and its rotation (gyroscope). During the descent of the grab into the wall, the NEMO BT sensor stores its internal measurements in memory. When the grab returns to the surface, the NEMO BT sensor transmits its measurements to the DIALOG MX which displays the trajectory followed by the grab (horizontal & vertical deviation and top view for rotation). The measurements are simultaneously saved in memory by the DIALOG MX.
Thanks to the Vision system data is accessible from any device connected to the internet, the measurements can be monitored at any time on a remote screen.
This also makes it possible to obtain graphical representations of the measurements and data for the purpose of quality control.